Selected Publications
V2X-ViT: Vehicle-to-Everything Cooperative Perception with Vision Transformer
Runsheng Xu*, Hao Xiang*, Zhengzhong Tu*, Xin Xia, Ming-Hsuan Yang Jiaqi Ma
ECCV 2022 [Paper] [Code]
The first unified transformer architecture for V2X perception, which can capture the heterogeneity of V2X systems with strong robustness against various V2X noises.
Runsheng Xu*, Hao Xiang*, Zhengzhong Tu*, Xin Xia, Ming-Hsuan Yang Jiaqi Ma
ECCV 2022 [Paper] [Code]
The first unified transformer architecture for V2X perception, which can capture the heterogeneity of V2X systems with strong robustness against various V2X noises.
OPV2V: An Open Benchmark Dataset and Fusion Pipeline for Perception with Vehicle-to-Vehicle Communication
Runsheng Xu*, Hao Xiang*, Xin Xia, Xu Han Jinlong Li Jiaqi Ma
ICRA 2022 [Project] [Paper] [Code]
The first large-scale open V2V perception dataset and the first open V2V coding framework.
Runsheng Xu*, Hao Xiang*, Xin Xia, Xu Han Jinlong Li Jiaqi Ma
ICRA 2022 [Project] [Paper] [Code]
The first large-scale open V2V perception dataset and the first open V2V coding framework.
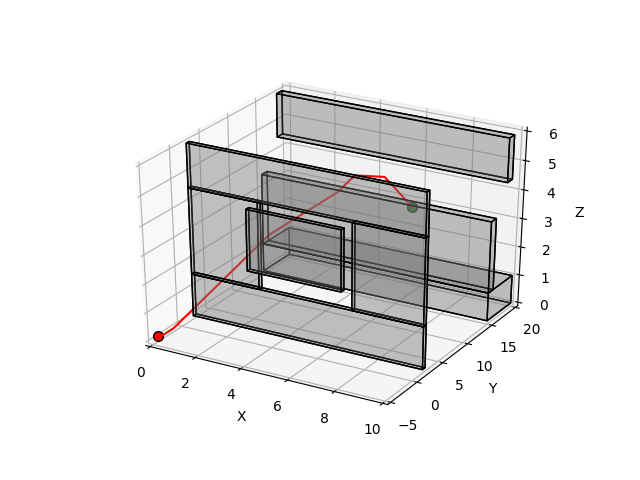
TridentNetV2: Lightweight Graphical Global Plan Representations for Dynamic Trajectory Generation
David Paz, Hao Xiang, Andrew Liang, Henrik I. Christensen
ICRA 2022 [Paper]
Generate dynamic trajectories for autonomous navigation via nominal graph-based global plan and a lightweight representation without the dependence on HD maps
David Paz, Hao Xiang, Andrew Liang, Henrik I. Christensen
ICRA 2022 [Paper]
Generate dynamic trajectories for autonomous navigation via nominal graph-based global plan and a lightweight representation without the dependence on HD maps
Probabilistic Semantic Mapping for Urban Autonomous Driving Applications
David Paz*, Hengyuan Zhang*, Qinru Li*, Hao Xiang*, Henrik I. Christensen
IROS 2020 [Paper]
Build probabilistic semantic maps by leveraging segmentation network uncertainty and the LiDAR intensity prior knowledge.
David Paz*, Hengyuan Zhang*, Qinru Li*, Hao Xiang*, Henrik I. Christensen
IROS 2020 [Paper]
Build probabilistic semantic maps by leveraging segmentation network uncertainty and the LiDAR intensity prior knowledge.